杭州网口运动控制卡编程
即便在其诞生的10年之后,EtherCAT的通信速度仍比快的CPU的运行速度还快,并且2003年使用EtherCAT的控制器到了2013年仍然可以在自动化设备上兼容使用–从某种意义上讲,它已经打破摩尔定律10年有余(虽然应用的领域稍有差别)。这也就是说,单一版本的EtherCAT,版本的EtherCAT就已足够支撑现今大部分的工业场景,后来所有添加的东西都只是扩展,而非改型,真可谓叫“匠心级”产品,相比于当前某些企业吹的什么“现象级”产品,水平不知道高到哪里去了。、东莞博派智能科技有限公司推出的ECAT_GAS2系列总线运动控制卡,同时支持EtherCAT和Ethernet,提供VC++/VB/C#/LABVIEW/LINUX/QT/DELPHI等动态库和API.普通电脑甚至笔记本就能用,非常方便。同时支持点、线、圆弧、螺旋线插补,支持连续小线段速度前瞻。同时可以接入外部手轮,主卡本身有2路模拟量输入和两路模拟量输出,非常方便。博派科技ETH_GAS系列控制卡的应用程序可以使用VC,VB,VS,C++,C#等软件来开发,程序运行时需要动态库。杭州网口运动控制卡编程

总线型运动控制器的通讯机制符合国际标准的运动控制功能,能满足产业机械领域的众多应用需求,除了提供常见的单轴定位,速度控制等功能外,也提供多轴控制如电子凸轮,电子齿轮,虚轴等功能,同时还封装了如轮切,飞剪等常用的应用功能块,只要是需要对多个轴进行控制的应用场合,总线型运动控制器都能很好的发挥其优势。东莞博派智能科技有限公司ECAT_GAS2系列总线运动控制卡,支持电子齿轮、电子凸轮、直线/圆弧插补、连续小线段前瞻等等。宁波正运动运动控制卡生产厂家博派ETH_GAS系列运动控制卡支持以太网或者串口编程。脉冲输出频率达2MHz。
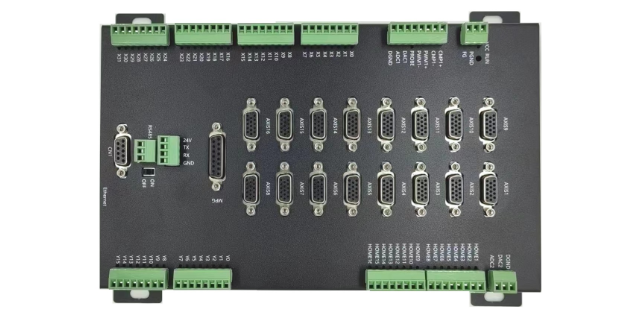
未来,锂电设备将朝着多工艺一体机及多工位设备的方向发展,设备搭载伺服轴数也将会同步增多,总线型的伺服产品将是大势所趋,这进一步导致锂电池设备行业的总线型伺服市场份额将进一步扩大。同时,随着国产伺服的应用发展,EtherCAT协议伺服产品也将得到进一步发展。(比如常规产品锂电设备切叠一体机,应用90—210个通用伺服)作为老牌大厂,松下也有自己的总线协议RTEX。不过RTEX用的较少,EtherCAT仍是主流。国内总线运动控制卡,做的比较好的是东莞博派智能科技有限公司的ECAT_GAS2系列,不仅支持EtherCAT.还有以下特点:1、板卡采用24V直流电源供电。2、控制卡自身有32路通用输入,采用光耦隔离,抗干扰能力强,数量可扩展。3、控制卡自身有16路通用输出,可直接驱动继电器,数量可扩展。4、控制卡支持IO扩展,可扩展至2048输入/2048输出。可满足所有应用场合。5、支持以太网或者串口编程。6、脉冲输出频率达2MHz7、控制卡支持多个并联使用。8、控制卡支持点位运动、速度控制、直线、圆弧、连续轨迹插补,支持速度前瞻。硬件捕获、电子齿轮/电子凸轮、位置比较输出。支持PT模式与刀向跟随。
博派ECAT_GAS2控制卡提供了VC++及C#和Delphi以及VB下的动态库,用户可利用动态库提供的API完成板卡打开、关闭、IO输入输出、电机点位/速度/插补/硬件捕获/电子齿轮/比较输出等运动控制功能。Labview下也可以通过调用C++动态库的方式使用。同时板卡支持Linux、Android、iOS、Wince、Python、QT等开发环境及语言。支持点位运动、速度控制、直线、圆弧、连续轨迹插补,支持速度前瞻。硬件捕获、电子齿轮/电子凸轮、位置比较输出。支持PT模式与刀向跟随。比如在机械加工方面,用电子凸轮来代替笨重的机械凸轮当然是比较简单的了。
运动控制卡是基于 PC 总线,利用高性能 微处理器 (如 DSP )及大规模可编程器件实现多个伺服电机的多轴协调控制的一种高性能的步进/伺服电机运动控制卡,包括 脉冲输出 、脉冲计数、数字输入、数字输出、 D/A 输出等功能,它可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电机的速度,改变发出脉冲的数量来控制电机的位置,它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式。脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于限位、原点开关等。库函数包括加速,直线插补和圆弧插补,多轴联动函数等。产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电机控制所需的各种速度、位置控制功能,这些功能能通过计算机方便地调用。一个运动控制系统中,运动控制卡是控制系统的模块,也是和控制系统的设计目的耦合紧密的,一旦运动控制卡选定了,其它的设计都要围绕运动控制进行选择和设计,所以如何选择运动控制卡,对运动控制系统的设计是非常重要的。ETH_GAS系列用于机器人、数控机床、3C设备、固晶机、焊线机、激光切割、激光焊接、包装机械、木工机械。武汉正运动运动控制卡编程
博派科技PLC以高速、稳健、高可靠度而著称,广泛应用于各种工业自动化机械。杭州网口运动控制卡编程
PLC的运动控制是指PLC系统通过控制运动设备的运动轴,实现精确、稳定和可编程的运动控制功能。它可以控制运动设备(如电机、伺服驱动器等)的位置、速度和加速度等参数,以实现所需的运动轨迹和运动逻辑。选取支持运动控制的PLC时,以下是一些关键因素和考虑事项:(1)运动控制功能:确保PLC具备完善的运动控制功能,包括轴控制、轨迹规划、速度和加速度控制等。PLC应支持多个运动轴的控制,并能满足具体应用的运动控制需求。(2)接口和通信能力:PLC需要提供与运动设备(如伺服驱动器、编码器等)的接口和通信能力。常见的接口包括模拟量输入/输出、数字量输入/输出、编码器反馈接口等。同时,PLC应支持常见的通信协议,如EtherCAT、CANopen等,以便与运动控制设备进行数据交换和协同控制。(3)编程和配置工具:PLC选型时,要考虑其编程和配置工具的友好性和便利性。一些PLC厂商提供专门的运动控制编程语言或函数块,简化了运动控制程序的开发和调试过程。(4)性能和实时性:选择具备足够的性能和实时性能的PLC,以满足高速、精确的运动控制要求。性能指标包括扫描周期、运动轴数量、数据处理能力等。杭州网口运动控制卡编程
上一篇: 杭州固高运动控制卡排名
下一篇: 杭州正运动运动控制卡品牌